

咨询热线
400-123-4567
400-123-4567
转自:http://blog.sina.com.cn/s/blog_7445c2940102x3x4.html
侵删
其实,在上高中的时候我们就已经对非线性优化的求解方法了然于心了。可见,非线性优化并不是我们想的那么困难,只不过在后来由于学习了大量的新知识,而迷失其中。你可能不相信,那么让我们一同回到高中的数学课上。数学老师给了如下的问题:

?如何找到上面这个函数的最小值?相信你很快的就能想起上面这个问题的解法,并且求出上面这个函数的极值。而至此,我们已经解决了一个非线性优化的问题。?为什么这么说呢?请看下面的公式:?

当这个公式中的f(x)是一个非线性函数的时候,上面的问题就是一个非线性优化的问题。?也就是说,非线性优化问题是针对一个非线性函数求最值的问题。那么,再让我们回过头看一看数学老师出的问题,这不就是一个非线性优化问题吗??而且,求解方法也很简单,就是对函数求导,再令导数为零,我们就找到了极值点。可见,非线性优化并不是一个高不可攀的山峰。?
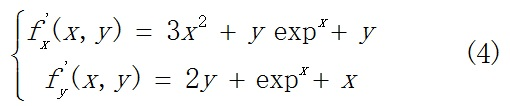
那么,我们是否可以对所有的非线性优化问题,都可以用上面的解法呢?很遗憾,对于很多情况,通过导数为零求解析的求出极值点,是做不到的,如下式:

我们对x,y分别求偏导,得到:
我们很难直接的从上面的式子中,求出导数为0的点。一方面,是因为该函数已经不是初等函数。另一方面,是因为增加了未知数(变量)的个数。我们重新写一下公式(1),如下:?

可见,这个函数是一个单变量的非线性函数,而且极值点只有一个。即使,增加x的幂次方,不过是增加了几个极值点,我们还是可以通过之前的办法,只不过将每个极值点的值都带回方程,就可以找到整个函数上的最小值。无论,这个一维函数如何复杂,都可以画在一个二维坐标中,如下:?
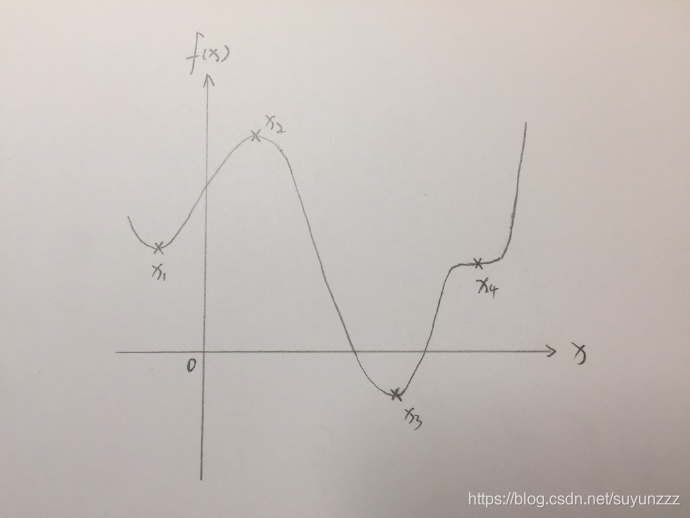
上图中,极值点1和点3是最小值点,点2是最大值点,而点4既不是最大值点,也不是最小值点。通过比较我们知道,点3是全局最小值点,而点1是局部最小值点。
但是,如果再增加函数的变量个数会发生什么呢?比如,只再增加一个变量y,此时函数变为f(x,y),而这个函数在x和y的方向上都有多个极值点。这时,我们还能将这个函数表示在三维坐标系下,如下:?
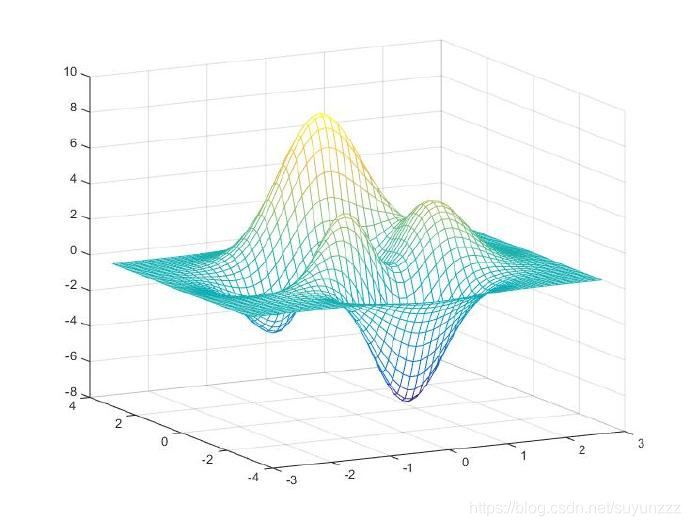
此时,极值点的分布就比一维的情况复杂了许多。当变量个数继续增加的时候,极值点的个数会成几何倍增加,显然也就无法通过求解出所有极值点再比较大小的方法,实现对问题的求解。?
上面的方法是一种比较贪心的解决方法,希望直接找到问题的解。俗话说,饭得一口一口吃,不能一口吃个胖子。这里要注意的一点就是,虽然我们不能直接找到函数值为零的点。但是,非线性函数的导数是存在的,也就可以计算出每一点的导数。也就是说,既然不能直接找到极值点,我们就应该一步一步的逐渐逼近函数的极值点。?
我们将原问题找f(x)的最小值(此处x为n维向量,不是一维的),变为找到f(x+Δx)的最小值,再依此迭代多次,逼近f(x)的最小值。此时,x变为已知,而未知是Δx的大小(当然也可以理解为方向,因为n维向量表示了一个方向)。也就是说,我们希望找到一个Δx,使得函数f(x+Δx)在点x处取得最小值。那么,一个自然的想法就是将f(x+Δx)对Δx求导,再另f’(x+Δx)=0就可以找到Δx的值。然而,这其实又回到了上面说的问题,即求f’(x+Δx)=0和f’(x)=0是一样不可求的。那么怎么办呢??
这就要祭出一个大杀器——泰勒级数展开?(有人称为线性化,其实不太准确。在一阶泰勒的情况下却是是线性的,但是如果加了高阶则不是线性了。)
因为,我们求的f(x+Δx)处于f(x)的邻域中,所以就可以用泰勒级数在点x处展开,如下:?

将上式对Δx求导,并令其等于0,得到:

因为上式存在Δx的高阶项,所以还是很难得到上式的解。不过,由于是在点x的邻域内,因此我们可以忽略Δx的高阶项。
(1)当我们只保留一阶项的时候,得到如下式子:?

上式中的J(x)在多维情况下,被称为雅可比矩阵,其实就是对f(x)求偏导。接着,一般书就会直接给出增量Δx的大小,如下:?

这个过程其实不太好理解。因为,如果从一维的角度理解,那么此处的f’(x)只是一个斜率,按理说斜率的多少跟Δx的值是无关的,只要Δx值不要太大保证在邻域内就可以。所以,直接得出上面的式子就感觉很诡异。?
其实,换一个角度解释上面的式子就很容易理解。这里让Δx等于负梯度,重点并不在于Δx的大小,而是规定了Δx的方向。其实,即使在1维里,我们也可以这么理解,Δx=-k,此处的k只用于提供方向,也就是正负号,而不代表走多远。?对于多维情况更是如此,因为我们需要知道增量的方向,而方向是由Δx各维度大小决定的。其实,一个更清晰的表示应该是将梯度归一化,然后再乘以一个步长系数,如下所示:?
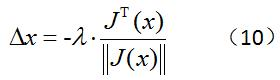
这个方法也就是我们经常听到的——最速下降法。
(2)如果我们保留到二阶项的时候,得到如下式子:?

上式中的H(x)被称为Hessian矩阵,而且J(x)和H(x)在点x的值是已知的,所以上式是一个线性方程组。写成矩阵形式如下:?

Δx的值可以通过解这个方程得到,求解方法由很多,在此就不再赘述。这个方法,就叫做——牛顿法。
说到这里,你可能会疑惑,既然非线性优化好像通过上面的方法都可以求解,那么为什么还有那么多数学家在研究这个问题。或者说,是不是世间所有问题,都可以通过这个方法求解呢?要想回答这个问题,我们需要重新来审视一下上面的求解过程。?
(1)==其实这个过程有个重要的前提,那就是f(x)是连续可导。如果f(x)这个函数不可导,或者不可微呢?==比如说,在SLAM中需要处理姿态估计的问题。而姿态是通过旋转矩阵和平移向量表示的,这显然是不连续的。但是,由于旋转矩阵是一个李群,那么我们可以将其映射到其李代数上。而且,李代数是可以求导的。所以我们就还可以利用非线性优化的方法对姿态进行估计。也就是说对于不连续的函数,我们可以想办法将其变得连续,从而继续用这种方法。?
(2)上面的解法求得的只是局部最优解,而不能确定是否是全局最优解。因为,这种方法可以说是一种“近视眼”的方法,它只看到下一时刻,在邻域内的最小值,而不能全局的寻找。所以,很容易陷入到局部最优中,或者说最终求出的最优值是跟初始位置极度相关的。即使初始值在同一个未知,也很有可能落入到两个不同的局部最优值中,也就是说这个解是很不稳定的。所以,如何解决这个问题,至今仍然存在很大的挑战。
比如凸优化就可以在一定程度上解决这个问题。凸优化的思想是,如果局部最优就是全局最优,就不存在这个问题了。那么如何将一个非凸的问题转换成凸的呢?或者什么问题就是凸的,什么是非凸的呢?
在此,只是粗浅的举了两个例子,其实非线性优化中存在的问题还有很多很多。而且我们在这里只讨论了无约束的情况,而优化问题真实情况往往是存在对变量的约束的。本文只是希望破除我们心中对非线性优化的恐惧,勇敢的迈进非线性优化这道大门。

